Development history and status
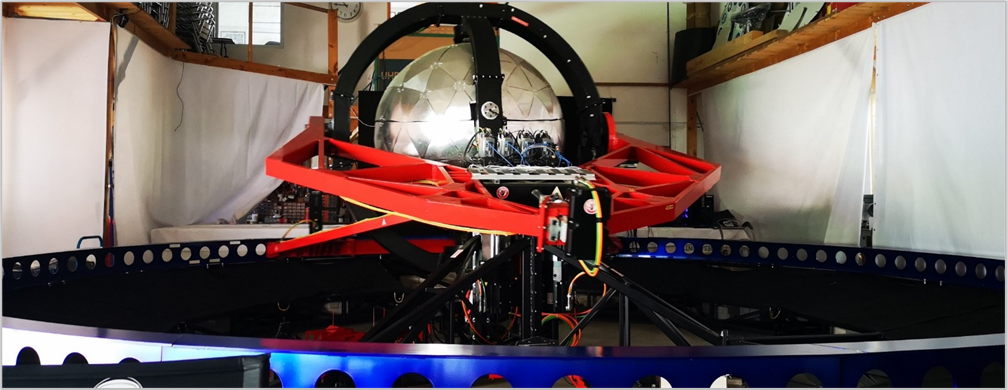
I N S P H A E R A and INSPHAERA 6 The Full Motion Gyroscopic Vehicle Simulator
Based on several years of medical and kinetic research, a completely unique and globally innovative multifunctional simulator capable of sustaining continuous and arbitrary G-forces in any direction has been developed as a result of Hungarian research, compared to the traditional Stewart platform simulators, which can partially and briefly mimic real motion.
The essence and novelty of the operation is that the complex kinetic system, based on the creation of a synchrony and sensation between the human body’s balance system and the visual stimulus seen in the simulator, opens up a completely new dimension in the simulation of air, land and water vehicles, while also enabling and making available new diagnostic methods in the field of medical sciences.
The technical solution does not aim at a stand-alone simulation framework, but is a completely open platform for almost any commercial (civil) or military simulation software, as it makes the servicing of these and the balance and coordination of movements that they simulate, and the experience they have on the user, fluid and complete.

The development process and results so far:
Phase 1
- Preparation
- Development of structural concepts
- Kinematic and dynamic modelling
- Preparation of basic control algorithm
Phase 2
- Refinement of structural solutions
- Static and fatigue testing
- Determination of mechanical requirements
- Control algorithm development
Phase 3
- Development of a dynamic model of a closed loop system
- Detailed mechanical design
- Static and fatigue testing
- Simulator software interface design
- Control logic, safety engineering development
Phase 4
- Manufacturing, material procurement
- Physical system (real-time) control development
- Assembly
- Commissioning, testing
The prototype (TRL 3 to TRL 7 level) was created in 2020 with the support of the NKFIH (NRDI) Fund.
The result products created during prototyping:
- Product and working prototype
- Mult-purpose G-simulator (MPGSim) Kinetic System technology
- Simulator control software
- Simulator software interface
- Modular control logic
Results of developments between 2020 and 2022:
- Redesigned and optimised running track as a result of testing
- Safety systems (electrical area and distance monitoring, barrier system)
- Improved data communication protocol and system
- User comfort (cabin ventilation, seat ergonomics for target machine)
- Control software and other applied software integrity improvements (version consolidation)
- Optimisation of control software and algorithm based on test results
- Kinetic algorithm beta version testing and bug fixing
- Testing of alternative kinetic control systems (G-force based vs. direction angle based models)
- Reworked landing gear and its performance enhancement
Specific technical characteristics
Boundless freedom of movement – Kinetic model with 6 degrees of freedom.
Continuous acceleration effect – Up to 3.5 G continuous load during simulation.
Vehicle of the imagination – Serving any vehicle (land, water, air and space) simulation software.
Experience the reality of virtual space – In addition to sound and vision, the sense of balance becomes part of the simulation.
Technical curiosities, parameters:
- Cabin weight: 130 kg + pilot (max. 100 kg)
- Runway diameter: 7 m
- Maximum torque on crankshaft: 7000 Nm
- Maximum peripheral speed: 54 km/h
- Number of engineer hours spent on the prototype: nearly 25,000 engineer hours
Research and development / The Future
- Making version 2.0: 4K-8K VR
- Obtaining EASA certification Completion of version 3.0: Virtual Dashboard technology, installation of hardware software. This will load the type-independent simulator.
Production
- Construction of the Kecskemét factory
- Setting up series production processes, purchasing the necessary equipment
- Training and instruction of workers
- Integration of VR glasses into gyroscopic environment
- Development and installation of VR dashboard to replace the current spherical projected image
- The goal of our VR development is to produce a type-independent, full motion simulator within one year, supported by VR glasses and with the VR instrument panel suitable for full motion EASA certification